






主要职责
中国科学院贯彻落实党中央关于科技创新的方针政策和决策部署,在履行职责过程中坚持党中央对科技工作的集中统一领导。主要职责是:
一、开展使命导向的自然科学领域基础研究,承担国家重大基础研究、应用基础研究、前沿交叉共性技术研究和引领性颠覆性技术研究任务,打造原始创新策源地。 更多+
院况简介
中国科学院是国家科学技术界最高学术机构、国家科学技术思想库,自然科学基础研究与高技术综合研究的国家战略科技力量。
1949年,伴随着新中国的诞生,中国科学院成立。建院70余年来,中国科学院时刻牢记使命,与科学共进,与祖国同行,以国家富强、人民幸福为己任,人才辈出,硕果累累,为我国科技进步、经济社会发展和国家安全作出了不可替代的重要贡献。 更多+
院领导集体


科技奖励
科技期刊

工作动态/ 更多


中国科学院学部
中国科学院院部

语音播报

8月25日上午,由中国科学院沈阳自动化研究所研制的“北极ARV”水下机器人被缓缓吊入雪龙船舱内,这标志着该型水下机器人在长期冰站的作业任务圆满结束。在北纬81度建立的长期冰站上,“北极ARV”在有效的5天作业时间里,累计冰下工作时间近10小时,累积航行8公里,先后三次自主完成了长期冰站指定海冰区(100米×100米)的冰下光透射辐照度、海冰厚度、冰底形态、海洋环境等参数测量工作,此外,还执行了“雪龙”船底海冰分布、尾部甲板重力柱下放、布放冰浮标在水下形态等勘查任务。
在海冰水下光辐照度和海冰厚度观测作业中,“北极ARV”从开凿的冰洞上释放入水,采用自主观测模式,对多融池海冰区域进行了精细水平观测作业,在选取的几个位置点上作了垂向运动,大幅度提高了冰下观测的精度与自动化程度。利用基于精确位置信息的科学数据,科学家可对北极夏季太阳短波辐射能在北极冰洋系统中的分配规律进行深入分析研究。
在科考作业间隙,沈阳自动化所的曾俊宝操控“北极ARV”对“雪龙”船底的海冰分布进行了详细拍摄,首次获得了“雪龙”号完整的冰下视频资料,可为我国将来建造新型破冰船提供第一手资料。此外,经过坐标变换,“北极ARV”采用自主作业模式找到已布放的冰浮标,并采用遥控模式对冰浮标底部形态进行观测,为冰浮标今后的布置提供科学依据。
通过此次试验性应用,进一步验证了“北极ARV”的现场作业、运动特性、自主/遥控混合控制和高纬度下的导航精度等多种能力。此次北极现场试验应用表明,“北极ARV”已成为北极科考中一种有效、连续、自主、实时的观测手段,可实现对冰下海冰物理特征、水文和光学特性等的同步精确观测,有望在今后的北极科考中发挥更大的作用。
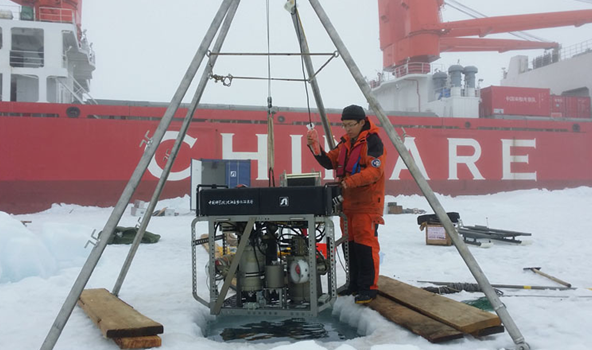
北极ARV作业现场

冰下视频截图





© 1996 - 中国科学院 版权所有 京ICP备05002857号-1  京公网安备110402500047号 网站标识码bm48000002
京公网安备110402500047号 网站标识码bm48000002
地址:北京市西城区三里河路52号 邮编:100864
电话: 86 10 68597114(总机) 86 10 68597289(总值班室)























