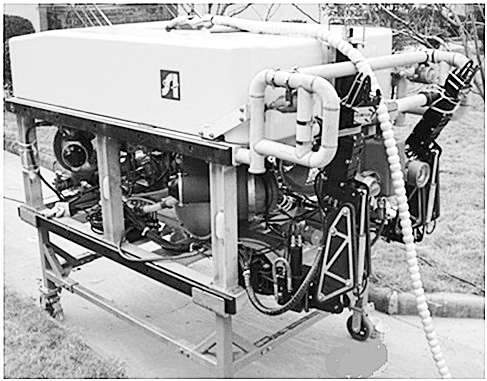
轻作业型遥控潜水器
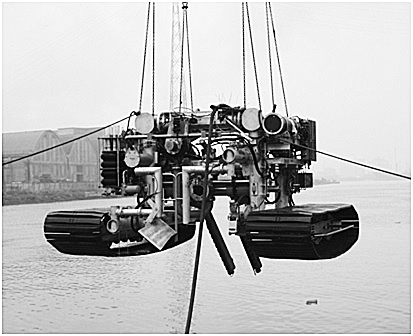
海缆埋设机
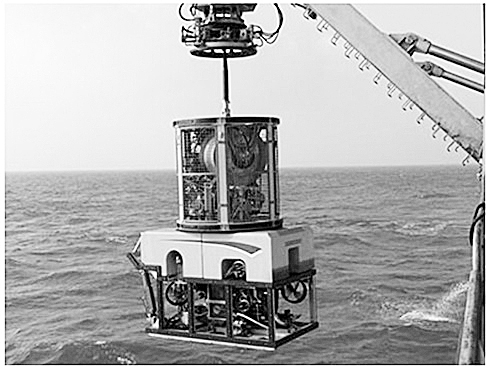
重载型遥控潜水器

实验室北极ARV作业现场
以前我们国家没有水下机器人,去不了北极的冰层下,都是通过定点进行观测,无法反映出海冰吸收的太阳辐射能的空间变化。现在我们能下去了,达到了这个平台,到达一个未知的领域。这样就可以得到一些更有价值的科学数据,进而分析科学问题,解释科学现象。
海洋是地球生命的摇篮,大洋深处孕育着无穷奥秘和丰富资源,人类探索海洋的渴望和努力从未停歇。海洋科考离不开高科技手段支撑,也离不开尖端装备的支持。
中科院沈阳自动化所海洋技术装备研究室是国内最早开展水下机器人技术研发,并以此为核心研究方向的专业海洋技术装备研发团队,主要从事海洋技术基础与应用技术研究、海洋装备研发与推广、海洋工程服务等工作。
水下机器人大显身手
2014年,对海洋技术装备研究室来说,是非同寻常的一年。深海滑翔机、“龙珠”号搭载“蛟龙”号试验、中国第六次北极科考中北极自治遥控潜水器(ARV)的应用,让人们把目光聚焦在他们研发的水下机器人上。
今年7月,“龙珠”号搭载“蛟龙”号载人潜水器,在西北太平洋采薇海山海区开展深海试验应用,并首次获取了“蛟龙”号在大洋深处的工作影像。
“龙珠”号是国家 “863”计划资助下自主研制的深海微型水下机器人,空气中重量仅有40公斤,配有3部电动推进器,通过一根光纤与“蛟龙”号相连,由“蛟龙”号球舱内的潜航员遥控控制,并且自带摄像机,可进行水下观察和录像,与“蛟龙”号互补形成更全面的观测能力。
在水下工作期间,“龙珠”号与“蛟龙”号按照预先规划的协同作业流程“分工协作”“默契配合”,完成了相互之间互动拍摄、“龙珠”号的释放与回收等预定工作任务,也验证了两种不同类型的潜水器在水下优势互补、协同作业的新模式。
海洋技术装备研究室主任李硕介绍,水下机器人有一个庞大的“家族”,其中载人潜水器(HOV)、有缆潜水器(ROV)、无人自治潜水器(AUV)和自治遥控潜水器(ARV)是目前四类最重要的潜水器。
深海滑翔机是水下无人自治潜水器的代表,是一种新型无人水下观测系统,主要由卫星链路控制其工作。水下工作时的滑翔机完全处于自主工作方式,具有制造成本和维护费用低、可重复使用、并可大量投放等特点,满足了长时间、大范围海洋探索的需要。
李硕告诉《中国科学报》记者,水下机器人的家族成员各有千秋。“ROV的优点是水面操作人员可实时观察到水下环境并遥控操作,对机器智能要求不高,缺点是由于电缆连接,其活动范围有限;AUV的优点是由于没有电缆连接,其活动范围较大,不受母船制约,不足是对机器智能要求较高,数据实时性差;ARV是介于AUV和ROV之间的潜水器,国外也有称作混合ROV的,其自带能源,通过很细的光纤连接,其活动范围介于AUV和ROV之间,数据实时性好,通常可完成简单轻作业功能。既可以自治大范围连续观测,也可以精确遥控精细观测,北极ARV就是ARV技术在北极的一种成功应用。”
北极ARV助力科考
据介绍,北极ARV水下机器人在北极协助科考人员考察方面,发挥了重要作用。
7月11日,北极ARV搭乘“雪龙”号科考船从上海前往北极执行我国第六次北极科考任务。这并不是北极ARV第一次探寻“冰世界”。
它曾先后参加我国第三、四次北极科考,在高纬度下实现了对冰下海冰物理特征、水文和光学特性等的自主精确同步观测,为我国北极科考提供了一种大范围的先进、连续、实时的冰下观测技术手段。
李硕介绍:“北极的海冰在不断地移动旋转,为得到精确的冰下位置信息,须将海冰的运动信息反馈到机器人上,以获取精确的导航信息。这些需要不断地完善改进,每一次北极探险后,北极ARV都会变得更加完善。”
改造后的北极ARV更加“小巧玲珑”,其体积和重量均减少一半,有助于在现场作业时设备的吊装和运输;同时将推进器方位进行了重新布置,增强了航行的机动性,使其在冰下航行更加灵活,更便于冰洞下潜与回收。
未来平台更广阔
“北极海冰融化对我国气候有着一定的影响。我们北极科考的主要目的,就是了解北极海冰快速融化的机理。”李硕说。
新一代北极ARV通过水下机器人携带光通量测量仪的观测,可连续测量出海冰吸收的太阳辐射能的空间变化,估算出同纬度更大范围海冰对太阳辐射能的吸收,以此计算出太阳辐射对该纬度北极海冰融化的贡献。
另外,通过水下机器人测量得到的冰厚图,可以反映出冰底的粗糙度,从而分析出海水对冰的影响等。李硕透露:“在未来,我们将根据科考需求,进一步增大作业范围,增加部分搭载设备以及机器人功能。预计2016年进行的我国北极科考,北极ARV还将积极争取参与。”
对于研究室的成员来说,北极ARV不仅仅是一个设备,更是一个通往更高科学道路的平台。
“以前我们国家没有水下机器人,去不了北极的冰层以下,都是通过定点进行观测,无法反映出海冰吸收的太阳辐射能的空间变化。现在我们能下去了,达到了这个平台,到达一个未知的领域。这样就可以得到一些更有价值的科学数据,进而分析科学问题,解释科学现象。”李硕说。
对于未来,李硕认为:“无人化、信息化、智能化和网络化的水下机器人是未来的发展方向。北极探险只是开始,南极、海洋深处等未知的领域会逐渐地熟悉,在未来,水下机器人会有更广阔的空间。”
(原载于《中国科学报》 2014-10-20 第8版 平台)

 联系我们
联系我们