“蛟龙号”的声学系统是由中国科学院声学研究所负责研制,其先进的高速数字化水声通信是“蛟龙”号三大国际领先技术之一。
声学系统的功能和组成
“蛟龙”号载人潜水器的功能是携带3名乘员到深海海底开展调查作业,声学系统为其提供通信、地形地貌探测、障碍物探测、测速和定位等功能。
“蛟龙”号载人潜水器的声学系统包括水声通信机、高分辨率测深侧扫声纳、避碰声纳、成像声纳、声学多普勒测速仪和定位应答器,见图1。水声通信机实现潜水器与母船之间的图像、语音、文字和指令通信,高分辨率测深侧扫声纳测量海底微地形地貌,避碰声纳测量各方位障碍物的距离,成像声纳探测前方的目标,声学多普勒测速仪测量潜水器的三维运动速度和下方的海流速度剖面,定位应答器确定潜水器的水下位置。前三部声纳是自主研制的,后三部声纳是购置的。通过良好的声学系统集成设计,整个声学系统协同工作,海试中工作状态良好。
图1 潜水器声学系统组成
1.2水声通信机
“蛟龙”号载人潜水器的水声通信机有4种功能:(1)相干水声通信,又称高速水声通信,传输速率约每秒数千比特,用于传输图像;(2)非相干水声通信,传输速率约每秒数百比特,属于中速通信,传输文字、指令和数据;(3)扩频通信,属于远程低速通信,传输速率约每秒数十比特,用于传输指令;(4)水声语音通信,采用模拟信号传输语音。
在下潜试验中,水声通信系统将潜水器的信息准确传送到水面指挥部,使指挥部能够实时掌控潜器的深度、运动速度、舱内温度、湿度、气压、氧浓度等各种信息,如亲临其境,做出决策,指导水下作业,保证下潜安全,提高作业效率;水下作业的现场图片可以传送到水面,供水面专家进行分析;同时,潜航员与水面指挥人员通过语音、文字和指令通信可以随时就试验情况进行交流。
“蛟龙”号水声通信机具有丰富的功能和良好的综合性能,在国际载人深潜器中处于领先地位,公开文献介绍,美国新型“阿尔文”(Alvin)号载人潜水器到2015年才能有传输图像的功能。日本“深海6500”(Shinkai6500)载人潜水器有水声通信传输图像的功能,但性能偏低,正在不断改进,这些改进尚未在载人潜水器上显现。
图2是三次深海试验时高速水声通信机传输的图像。



(1)第40潜次,距离2956米 (2)第41潜次,距离3838米 (3)第42潜次,距离5048米
图2 2011年5000米级海试中“蛟龙”号通过水声通信机传回的现场图像
1.3高分辨率测深侧扫声纳
高分辨率测深侧扫声纳是基于声学所专利技术研制的装备,能够同时获得海底的三维地形图和二维侧扫图。在国际载人深潜器中,高分辨率测深侧扫声纳是“蛟龙”号独有的设备,为“蛟龙”号提供了探测海底和水中小目标的能力,还能为海底资源分布规律等研究提供基础性和关键性资料。图3和图4是在5188米深度海区获得的海底地形图和侧扫图。
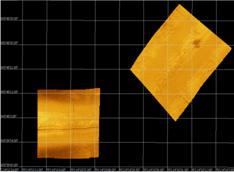
图3 扫测区域地形图 图4 扫测区域的侧扫图