2013年12月14日,嫦娥三号探测器成功实施动力下降并在月球虹湾地区安全实现软着陆;15日,成功实施着陆器巡视器分离和互拍成像,并传回了清晰的图像,标志着嫦娥三号任务取得圆满成功。嫦娥三号任务的圆满成功,实现了我国航天器首次在地外天体软着陆和巡视勘察,标志着我国探月工程“绕、落、回”第二步战略目标取得全面胜利,在我国航天事业发展中具有重要里程碑意义。
在嫦娥三号任务取得圆满成功的重要历史时刻,中科院承研的激光测距敏感器、激光三维成像敏感器、着陆缓冲机构拉伸杆、地形地貌相机、全景相机等重要仪器设备以及VLBI(甚长基线干涉测量技术)精密定位等任务都经受住了考验,任务执行表现完美,为嫦娥三号探测器的成功软着陆、两器互拍成像等做出了突出贡献。
720秒内的高精度测距和成像避障
嫦娥三号探测器将从距月面15千米的近月点实施动力下降,相对速度从每秒1.7公里逐渐降为零,历经两次悬停,整个着陆过程仅为720秒,悬停避障最长时间仅为30秒,让人惊心动魄。
然而,就是在这720秒里,中科院上海技术物理研究所研制的激光测距敏感器持续为地面测控提供了探测器精确稳定的轨道高度数据,各测距方向工作通道依次准确自动切换,以0.2米的高程测量精度有力地保障了落月成功。同样与时间赛跑的,还有中科院上海技术物理研究所研制的激光三维成像敏感器。激光三维成像敏感器在探测器着陆前5分钟开机,最后数据显示,在探测器距离月面98米的悬停阶段开始工作;在3秒左右的时间内,成功实现着陆区三维地形扫描成像并完成数据信息处理,为嫦娥三号探测器避开月面土坑和石块并实现安全软着陆做出了重要贡献。
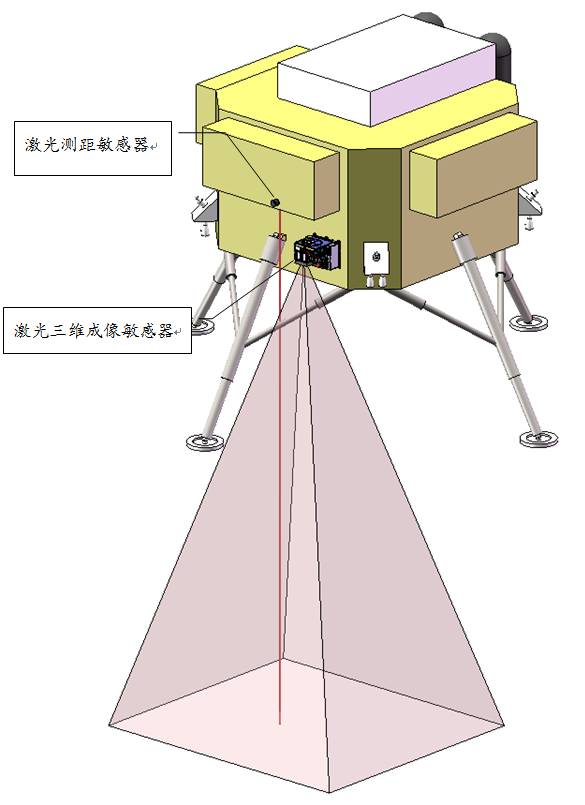
图1:激光测距敏感器、激光三维成像敏感器工作示意图
着陆瞬间的拉伸缓冲吸能
尽管激光三维成像敏感器已经对着陆地点进行了地形成像识别和避障,但嫦娥三号探测器着陆月面时来自月面的巨大冲击力仍是其安全着陆的最大威胁。然而,中科院合肥物质研究院固体物理研究所研制的着陆缓冲机构拉伸杆作为嫦娥三号探测器着陆腿的“腿骨”,在着陆的瞬间承受住了巨大冲击力的考验。着陆缓冲机构拉伸杆具备极高的拉伸塑性、适中的抗拉强度和稳定的响应行为,可以高效、可靠、稳定地发挥吸能作用。在嫦娥三号探测器着陆的瞬间,四条主着陆腿将通过足垫的滑动向外张开,利用“腿骨”缓冲拉伸杆的塑性伸长及其它吸能部件的变形吸收冲击能,极大降低了着陆时的冲击力,确保嫦娥三号探测器成功软着陆并站稳了我国航天器在月球上第一步。
着陆后的快速精密定位
嫦娥三号探测器成功软着陆并站稳脚步的时刻,却是中科院上海天文台承担的VLBI测轨分系统工作最为紧张的时候,因为要在短时间内完成对嫦娥三号探测器着陆点进行的精密定位。探测器成功着陆后,VLBI中心立刻向北京航天飞控中心发送了嫦娥三号探测器落月轨迹和落月位置,时延残差约为0.8纳秒,时延残差率约为1.3皮秒每秒。经过与VLBI中心的紧张比对,北京航天飞行控制中心最终确定了嫦娥三号探测器的准确着陆位置:月球北纬44.12°,西经19.51°。VLBI分系统的高精度测量结果,准确地支持了嫦娥三号探测器落月过程和着陆点精密定位。
两器互拍的伟大见证
两器完成互拍并获得图像是嫦娥三号任务取得圆满成功的判据,也是五星红旗红耀月球的伟大见证。毫无疑问,这份责任和压力都压在了中科院光电技术研究所研制的着陆器地形地貌相机和中科院西安光学精密机械研究所研制的巡视器全景相机的身上。
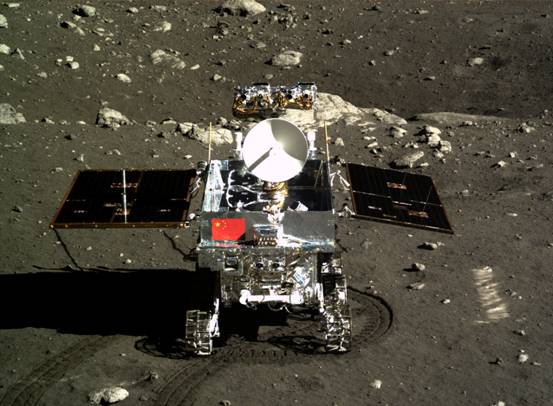
图2:地形地貌相机拍摄的“玉兔号”月球车及首张五星红旗图像
15日23时许,嫦娥三号任务进行了首次互拍成像试验,中科院光电技术研究所研制的重量仅570克的地形地貌相机成功拍出“玉兔号”月球车的清晰图像。图像显示,月球车“胸前”的五星红旗鲜艳夺目,地形地貌相机完美还原了这面五星红旗的“中国红”。地形地貌相机集彩色照相、摄像功能于一体;与国内同类空间轻小型相机相比,该相机体积小、重量轻、功耗低,功能更加齐全。同时,地形地貌相机在技术上克服了月球白天120℃的高温、太阳高度角变化大等对相机成像质量的影响,能拍摄出高质量的动态、静态图像。

图3:全景相机拍摄的嫦娥三号着陆器图像
同样在15日23时许的嫦娥三号任务首次互拍成像试验中,中科院西安光学精密机械研究所研制的巡视器全景相机成功拍出嫦娥三号着陆器落月的第一幅清晰图像。该研究所研制的CCD立体相机,曾在嫦娥一号、嫦娥二号任务中拍摄出世界最全、最清晰的月面图。全景相机是一套双眼视觉系统,用于获得目标高清晰图像和距离信息,具有全景成像、辅助导航等多种功能。它由功能、性能、接口完全一致的两台单机组成,安装在“玉兔号”月球车的桅杆上,相当于人的两个眼睛,利用月球车桅杆360°的旋转和90°的俯仰获得周边多幅图像,通过图像拼接获得从3米到无穷远的全景彩色图像。
在接下来的1个月甚至更长的时间里,地形地貌相机和全景相机还将分别对着陆区和巡视区进行光学成像,以供科研人员开展月表形貌和地质构造、月面物质成分和可利用资源等方面的科学研究。

 联系我们
联系我们