






主要职责
中国科学院贯彻落实党中央关于科技创新的方针政策和决策部署,在履行职责过程中坚持党中央对科技工作的集中统一领导。主要职责是:
一、开展使命导向的自然科学领域基础研究,承担国家重大基础研究、应用基础研究、前沿交叉共性技术研究和引领性颠覆性技术研究任务,打造原始创新策源地。 更多+
院况简介
中国科学院是国家科学技术界最高学术机构、国家科学技术思想库,自然科学基础研究与高技术综合研究的国家战略科技力量。
1949年,伴随着新中国的诞生,中国科学院成立。建院70余年来,中国科学院时刻牢记使命,与科学共进,与祖国同行,以国家富强、人民幸福为己任,人才辈出,硕果累累,为我国科技进步、经济社会发展和国家安全作出了不可替代的重要贡献。 更多+
院领导集体


科技奖励
科技期刊

工作动态/ 更多


中国科学院学部
中国科学院院部

语音播报

近日,中国科学院深圳先进技术研究院深圳先进集成技术研究所智能仿生研究中心研究员吴新宇研究团队与香港城市大学副教授申亚京团队合作,提出一种通用、可扩展、能应对不同场景的微型机器人制造方式——利用胶质磁性喷雾使无生命目标物体成为可控微型外骨骼。
微型机器人由于具有良好的可控性和适应性而在生物医学中有着广泛应用前景。然而,考虑到目标对象多变的尺寸和形状,以及工作环境的非结构化和不可预测,单一机器人难以应对不同的任务或环境。可扩展、通用、能应对不同场景的微型机器人制造方法仍存在挑战。
在自然界,很多生物本身没有较好的运动能力,但是它们可以通过寄生或吸附的方法利用其他生物或物体到达自身难以企及的地方,比如,有一种彩蚴吸虫能够感染蜗牛并控制蜗牛违背原来的生活习性爬到高处。受此演化启发,研究团队研发出一种由聚乙烯醇(PVA)、谷蛋白(Gluten)和铁粉(Iron particles)混合而成的胶质磁性喷雾,通过对目标物体表面喷涂的方式,给它穿上一层磁性外衣(约100-200um厚度),将无生命物体变成可以磁驱的微型机器人智能体。该种磁性喷雾在固化前表现出良好的自粘性,能够粘附亲水和疏水的表面,在磁性喷雾固化后其自粘性会随之消失,即在对物体表面贴合的同时,对外界环境不表现出粘性。这一特征保证了外界环境不会对物体的运动造成不良影响。
这种利用物体本身结构实现运动的方法具有较强的适应性。研究人员从理论分析和有限元模拟等角度入手,阐明该类喷雾磁化方法的微型机器人通用运动学和动力学模型。理论分析显示,在磁力矩和磁拉力作用下,不同的微型机器人会依靠其本身独有的结构和形态产生相应的变形以及步态。为进一步验证该策略的可行性,研究团队使用磁性喷雾将棉线、折纸、PDMS薄膜和塑料管等各种不同材料和形状的常见物体转化为磁驱机器人,并在磁场驱动下实现爬行、行走、滚动和游动等运动形式,与理论分析一致。除具备良好运动能力外,覆盖在物体表面的磁性喷雾还具有可控离解、可重编程等特点,为其在生物医学领域的应用提供可能,如主动送药、可控内窥探头等。
将无生命的物体按需转化为可移动的微型机器人的策略,为在不可预知的有限空间进行操作、运输和交付提供潜力。吴新宇表示,这种“寄生”的方式,给仿生机器人的设计提供新思路,希望能够利用该策略,拓展现有的结构仿生,将来能够设计出具有运动能力的传感器、微外骨骼等。相关研究成果以An agglutinate magnetic spray transforms inanimate objects into millirobots for biomedical applications为题,发表在Science Robotics上。深圳先进院副研究员尚万峰和香港城市大学博士生杨雄为论文共同第一作者,吴新宇和申亚京为论文共同通讯作者,其他作者包括香港城市大学博士陆豪健、刘雁婷、杨柳和谭蓉。
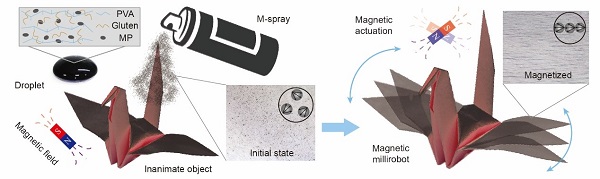
图1.磁性喷雾将无生命物体转变为磁控微型机器人的过程
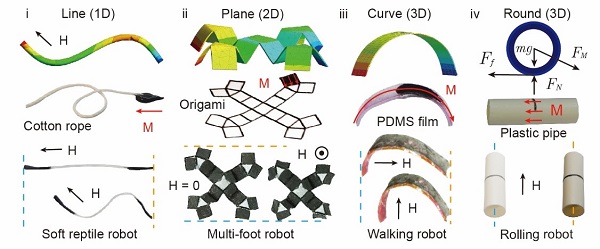
图2.磁性喷雾将不同材料和形状的目标物体变为磁控微型机器人

图3.覆盖在目标物体表面的磁性喷雾在振荡磁场下解体





© 1996 - 中国科学院 版权所有 京ICP备05002857号-1  京公网安备110402500047号 网站标识码bm48000002
京公网安备110402500047号 网站标识码bm48000002
地址:北京市西城区三里河路52号 邮编:100864
电话: 86 10 68597114(总机) 86 10 68597289(总值班室)























