院况简介


1949年,伴随着新中国的诞生,中国科学院成立。
作为国家在科学技术方面的最高学术机构和全国自然科学与高新技术的综合研究与发展中心,建院以来,中国科学院时刻牢记使命,与科学共进,与祖国同行,以国家富强、人民幸福为己任,人才辈出,硕果累累,为我国科技进步、经济社会发展和国家安全做出了不可替代的重要贡献。 更多简介 +
院领导集体
创新单元
科技奖励
科技期刊
科技专项
中国科学院院级科技专项体系包括战略性先导科技专项、重点部署科研专项、科技人才专项、科技合作专项、科技平台专项5类一级专项,实行分类定位、分级管理。
为方便科研人员全面快捷了解院级科技专项信息并进行项目申报等相关操作,特搭建中国科学院院级科技专项信息管理服务平台。了解科技专项更多内容,请点击进入→

科研进展/ 更多

工作动态/ 更多


中国科学院学部
中国科学院院部

语音播报

2016年,AlphaGo和韩国九段棋手李世石的人机大战,使人工智能被大众所熟知,人工智能的产品(图1)早已潜移默化地影响着我们的生活,如智能家居扫地机器人自动在房间内完成地板清理工作,甚至可以去指定地方充电;中国快递公司的“小橙人”能够全自动分拣包裹并在地面上灵活穿行,将包裹准确运送到指定位置……尽管人工智能给现代生活带来了便捷,但目前的技术面对模糊思考时显得力不从心。智能机器人的“智商”到底是令人担忧到什么地步呢?日本福岛核电站发生泄漏后,本被寄予厚望的机器人并没有顺利完成灾后事故处理任务,大量人力还需要被投入到此类高风险工作中。此外,现今火爆的无人驾驶概念模型仅仅完成了在某些场景较为单一的高速路段测试,如想实现无人车在复杂、人口密集的城市中进行自动驾驶这一设想仍然有漫长的路要走。

图1 人工智能产品
为了突破这些瓶颈,进阶版智能技术革命——“类脑智能”来临了。科学家们开始向自己的大脑学习,认定高度智能化构想的实现可以从脑科学中获得启发。类脑智能又称为类脑计算,上世纪80年代末,美国科学家Carver Mead首次提出类脑计算的概念。类脑计算这一想法摆脱了传统的计算模式,模仿人类神经系统的工作原理,渴求开发出快速、可靠、低耗的运算技术。类脑智能是人工智能的终极目标,但研究类脑智能不可能复制人的大脑。类脑智能希望通过研究人类大脑的工作机理并模拟出一个和人类一样具有思考、学习能力的机器人。很多人提出质疑:像人脑一样“聪明”的机器人?简直是天方夜谭!科学家们在类脑智能领域面临着很多难题:
1.视觉感知难。机器人的眼睛常常依赖于机载的摄像机来采集视觉图像。机器人大脑如何从图像中识别关键信息呢?如人脸、手势或障碍物。在常规环境下,现有技术已可以高精度地实现这一任务。但自然条件下,视觉图像由于光线、视角、物体运动等多类不稳定因素的综合影响很难被准确识别。尽管一系列性能优异的深度学习理论模型大量涌现,但复杂环境中的视觉感知依然是一大难点,目前突破有限。
2.沟通交流难。机器人怎样与人对话呢?机器人依靠传感器收集外界声音信号,通过语音识别系统和相关处理技术将信号进行分析解读。机器人“听懂”后,其“中枢系统”会做出相应的动作指示或通过语音合成器模拟人类说话。在嘈杂的现实环境中,现有的语音识别技术很难成功而高效地实现语音识别、理解和处理操作。
3.大脑思考难。机器人的“大脑”是一个智能终端,负责着繁杂的计算任务以及信号接收、指令下达等重要功能。同人类一样,机器人没有“大脑”或者“大脑”不太灵光都使得行为迟缓,甚至整个机体“瘫痪”。随着机器人应用范围的不断扩充,“大脑”容量、思维速度等都有更高要求。目前科学家们尝试着将云计算、云存储等先进技术引入到机器人后台上,努力让机器人“大脑”向着信息更丰富、运算更快、反应更准确、学习更灵活的方向迈进。
4.稳定行走难。区别于机械臂等固定作业的机器人,类脑智能机器人的应用一定是个动态过程,换句话说,机器人要有一条坚固、灵活的“腿”。机器人的“腿”不在于长短、粗细,更关注的是其稳定性、自由性。受到生物学启发,科学家们尝试着将人类腿部膝关节弯曲伸展的工作机制移植到机器人上,以此来看,双足机器人(图2)将有望跨越台阶,行走在山地、灾后等地形复杂的环境中,将人力从高危行业中解救。此外,另一类能移动的机器人——轮式机器人虽然不要求造出实体“腿”,但其必须具有一对隐形、灵活的“腿”,需要学会自主认路、自主避障、完成动态优化行走路径等一系列高难度任务。
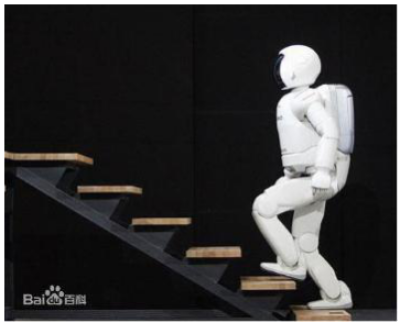
图2 双足行走机器人蓝图
以上列举的难点仅仅是类脑智能探索道路上的少数障碍物,真正实现的一天还距离我们十分遥远。近年来,世界各国都相继对这一领域投入了大量精力研究。2013年6月,美国公布了“推进创新神经技术脑研究计划”(简称“BRAIN”),旨在探索人脑构造、理解人脑工作原理。而在同年初,欧盟委员会也宣布“人脑工程”(简称“HBP”),主要任务是通过模型方式再现人脑工作;2014年9月,日本启动了大脑研究计划。2016年,中国全面启动了脑科学计划。该计划主要有两个研究方向:倾向于医学的大脑揭秘、脑部病变研究,以及类脑智能的技术开发。目前我国已取得了一些喜人的成绩,如复旦大学开发出一种能够“望、闻、问、切”的中医机器人(图3)——“中医一号”;百度公司研发的智能围棋系统Bingo,在大规模实战中战胜了两名业余5段棋手;国防科技大学利用人脑电波指挥机器人行动(图4),可以说这类“脑控机器人”从一定程度上实现了我们在科幻大片中常见的用人脑直接控制机器人的震撼场景。


图3 中医机器人概念图 图4 脑控机器人
此外,两个类脑智能研究依赖的方法技术,其一是深度学习技术。该项技术通过把海量与任务相关的数据直接投放到模型中,依据人脑思维模式而建立的系统就会自动利用这些数据不断学习,丰富自我认识。这种近乎“黑盒子”一样的计算方式较好地再现了人类大脑的“归纳”、“推测”过程,在图像识别、分类方面有着极为优异的表现。但正如前文所提到的,深度学习技术在真正处理现实图像、信号方面依然需要不断改进。深度学习技术致力于使机器人具有自我学习能力,另一个技术热点——强化学习的主要目的是帮助机器人形成从环境到行为映射的学习,在机器人智能控制等领域有许多应用。强化学习这种训练方法不是告诉系统如何产生正确的动作,而是通过评价产生动作的好坏来不断改进运动方案,进而帮助机器人找到环境中的最优行动路径(图5)。
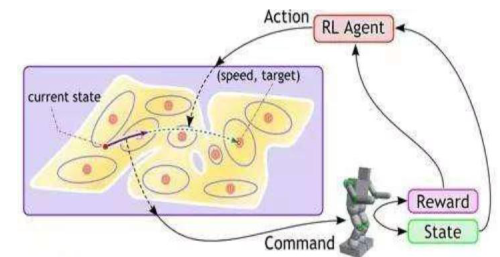
图5 强化学习工作原理
类脑智能技术充分学习人脑的思维模式,从仿生角度努力寻求人工智能的突破。这一热门学科前景诱人,应用范围广阔。科学家们曾预言一个国家类脑智能的发展水平将极大程度影响该国在军事、工业等众多行业的发展,因此类脑智能技术的发展显得尤为重要与急迫。同时,我们也承认,这条探索之路道阻且长,荆棘密布,众多难题还在等着我们一一击破。可我们不应该迎难而上吗?毕竟我们曾经向鸟学习发明了飞机,向鱼学习发明了潜艇,如今向自己学习又有什么好胆怯的呢?(作者:沈阳自动化所机器人学研究室 赵冬晔)






© 1996 - 中国科学院 版权所有 京ICP备05002857号-1 京公网安备110402500047号 网站标识码bm48000002
地址:北京市西城区三里河路52号 邮编:100864
电话: 86 10 68597114(总机) 86 10 68597289(总值班室)
编辑部邮箱:casweb@cashq.ac.cn

© 1996 - 中国科学院 版权所有 京ICP备05002857号-1 京公网安备110402500047号 网站标识码bm48000002
地址:北京市西城区三里河路52号 邮编:100864
电话: 86 10 68597114(总机) 86 10 68597289(总值班室)
编辑部邮箱:casweb@cashq.ac.cn
© 1996 - 中国科学院 版权所有
京ICP备05002857号-1
京公网安备110402500047号
网站标识码bm48000002
地址:北京市西城区三里河路52号 邮编:100864
电话:86 10 68597114(总机)
86 10 68597289(总值班室)
编辑部邮箱:casweb@cashq.ac.cn